Control Systems
Overview
The Control Systems Team is an Integrated Project Team (IPT), which is part of the Electronics Department. The members are responsible for the design, implementation and testing of control algorithms that allow the rocket to automatically perform actions needed for a successful mission.
Our main activities include modeling the systems under control, identifying parameters of interest and using such models to code control algorithms. After an algorithm is developed, we test it extensively to ensure good performances for every operating condition of the system, both in real-life tests and in simulations, thanks to a hardware-on-the-loop pipeline.
Navigation and attitude system
The Navigation and Attitude System is the algorithm responsible for the on-board estimation of the rocket position, velocity and attitude.
The algorithm fuses together the information of many different sensors, such as IMU, GPS, barometers, pitot tube, and fuses it while minimizing the effect of noises and disturbances.
The NAS algorithm is also responsible for the on-board determination of operating conditions, flight phases, and main rocket’s events, such as apogee detection, parachute deployment and landing.
The algorithm is based on a Multiplicative Extended Kalman Filter, designed on MATLAB and tested directly on the on-board software.
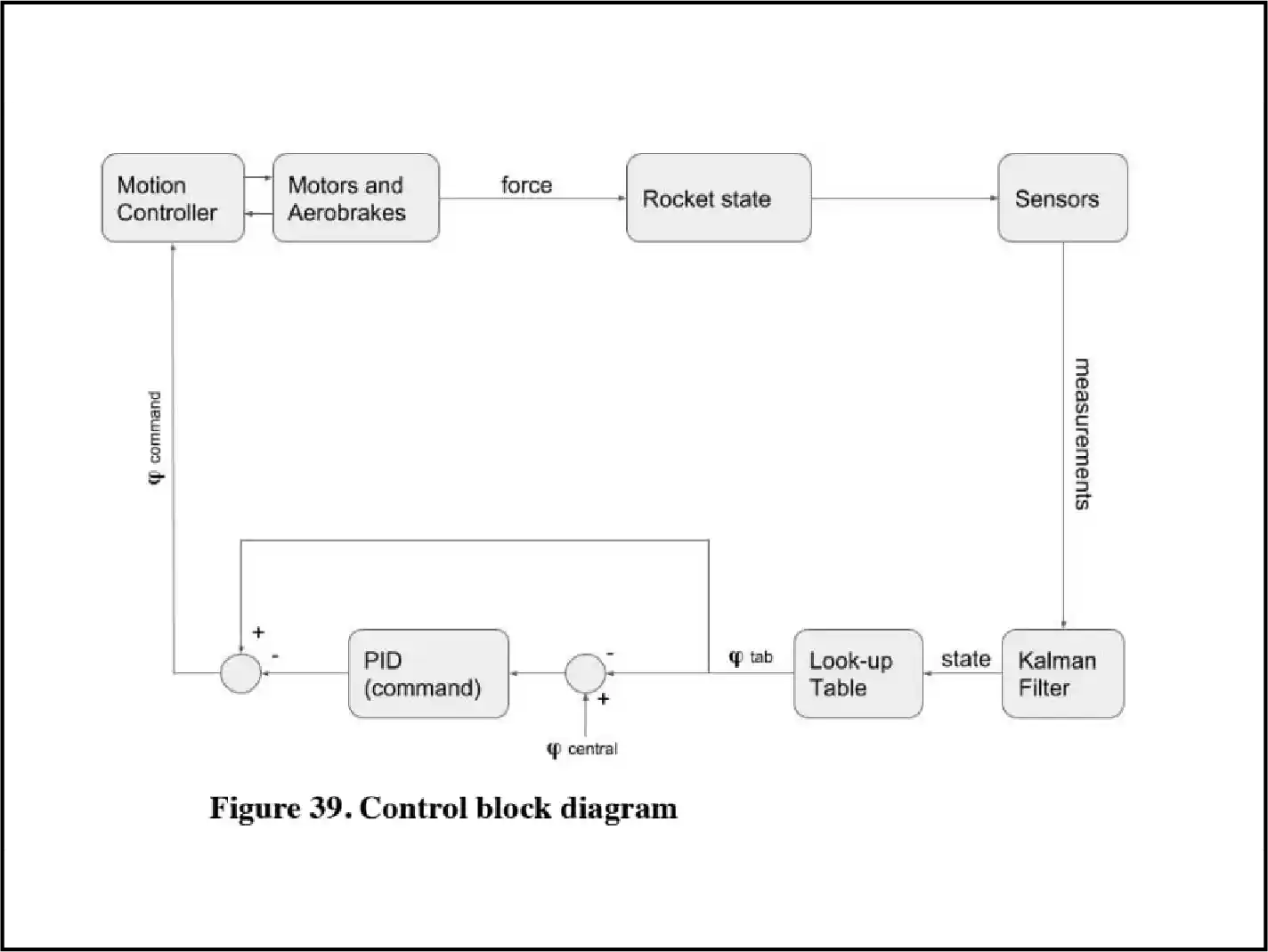
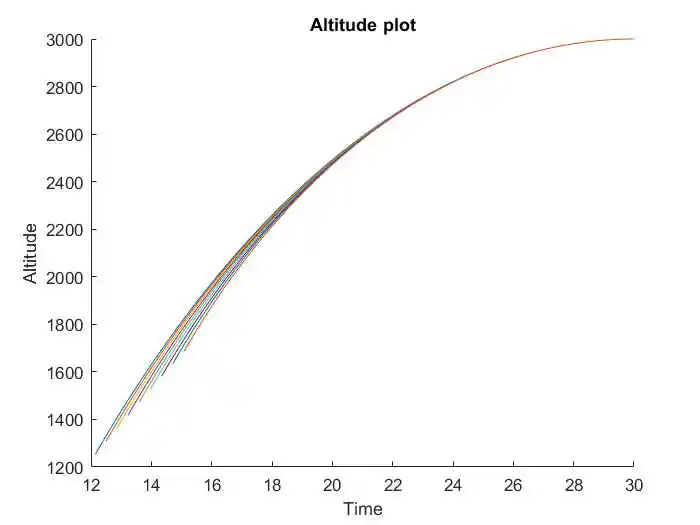
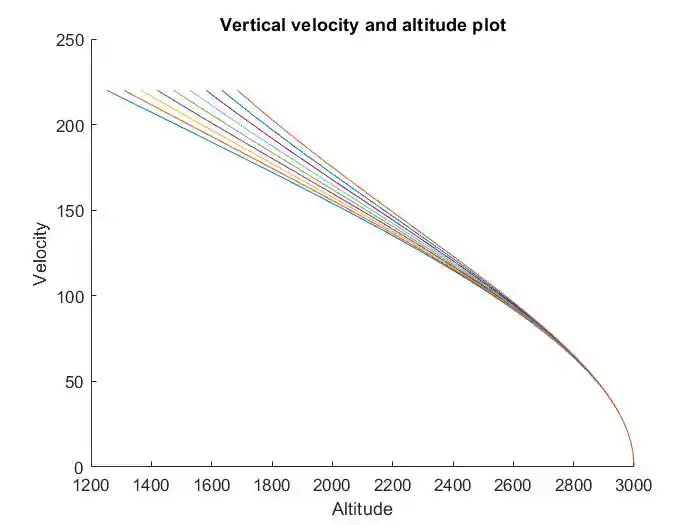
Air Brakes Control System
The Air Brakes Control System is the algorithm that controls the extension of the air brakes with the aim of reaching the target apogee as precisely as possible.
Offline, a set of trajectories of the rocket that reaches the target altitude are computed accounting for differences in initial conditions and air brakes opening.
During the flight, the control algorithm chooses the optimal one and tries to follow it, controlling the exposed area of the air brakes, and therefore the vertical velocity and position of the rocket.
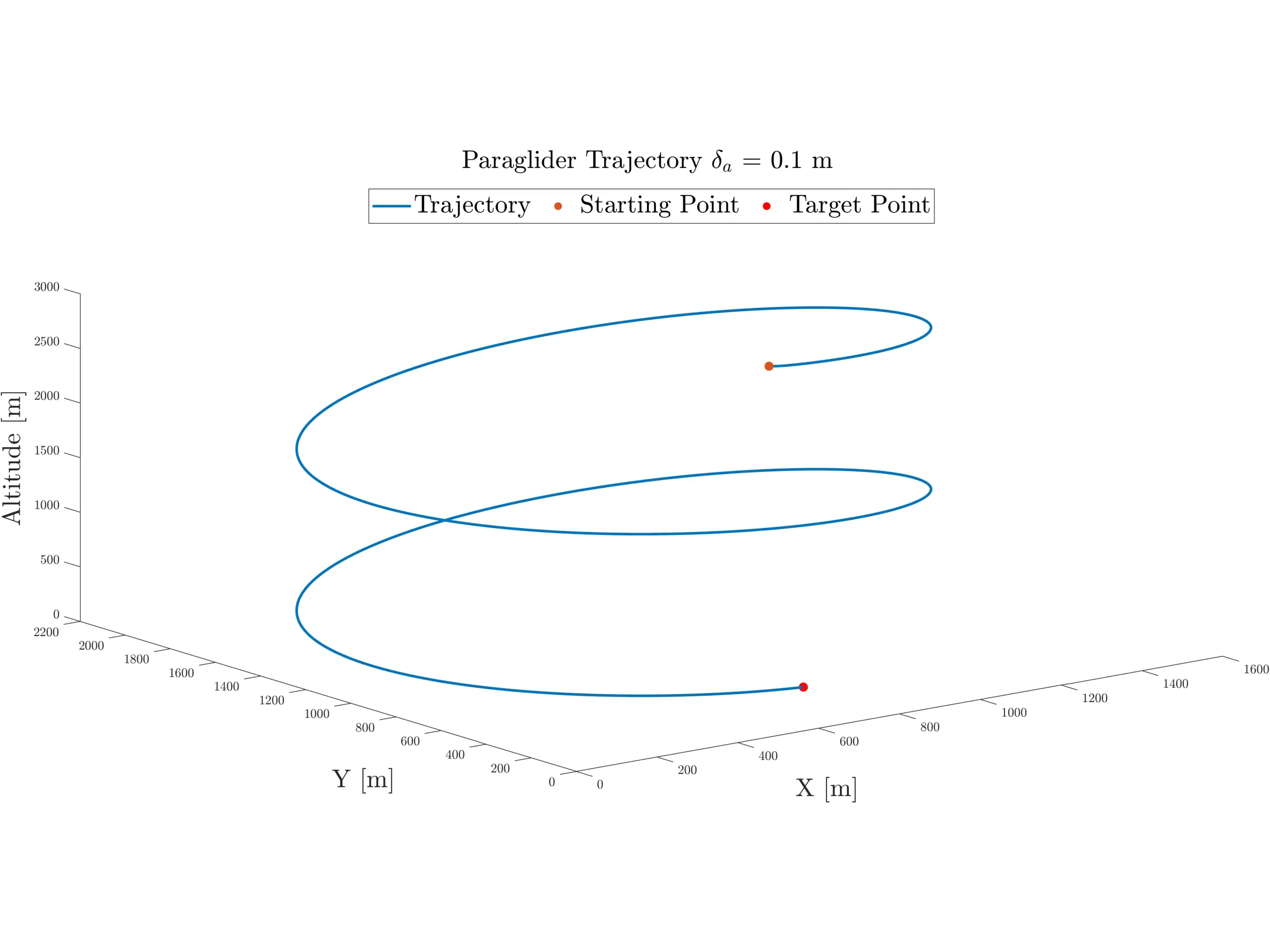
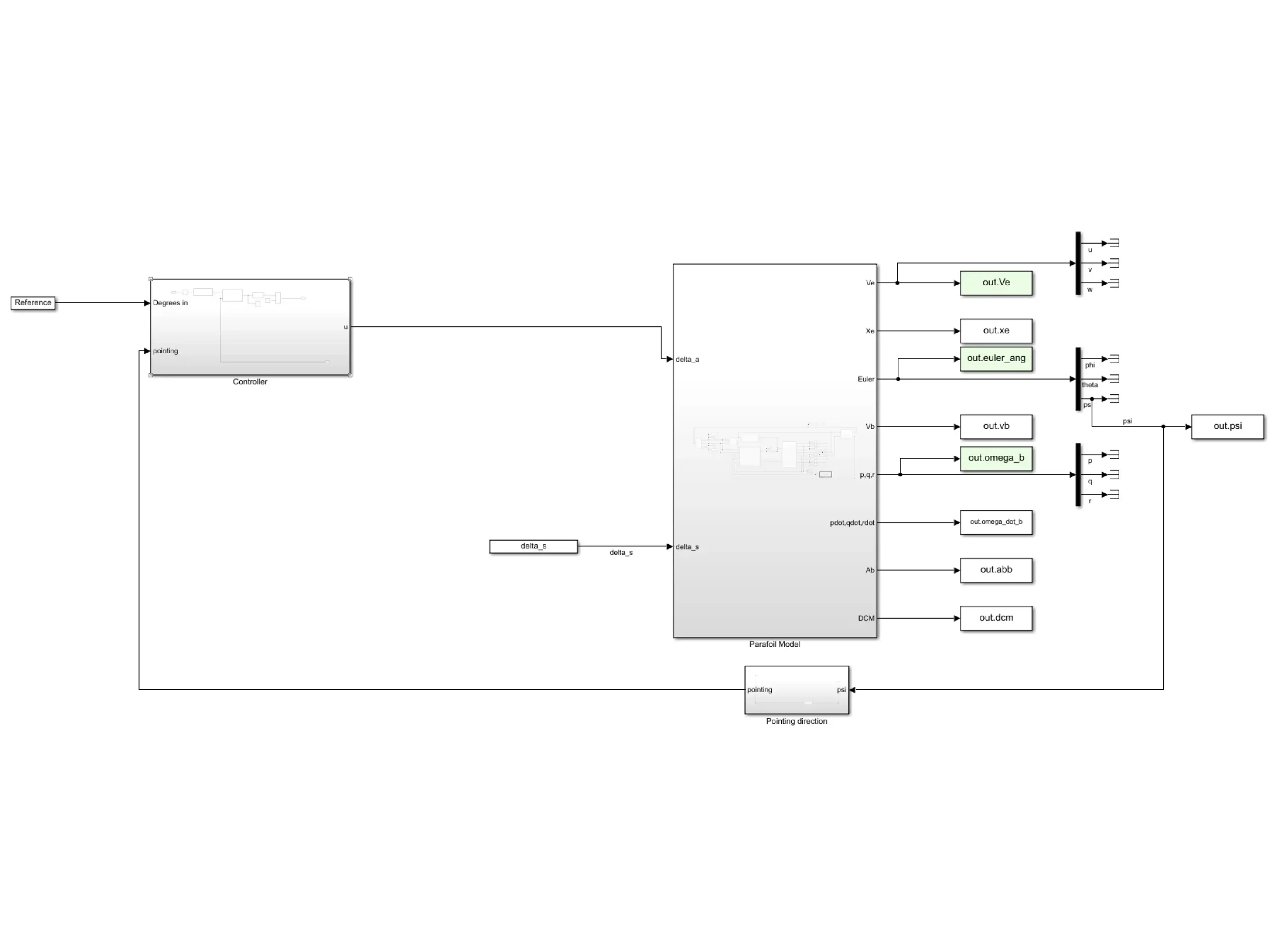
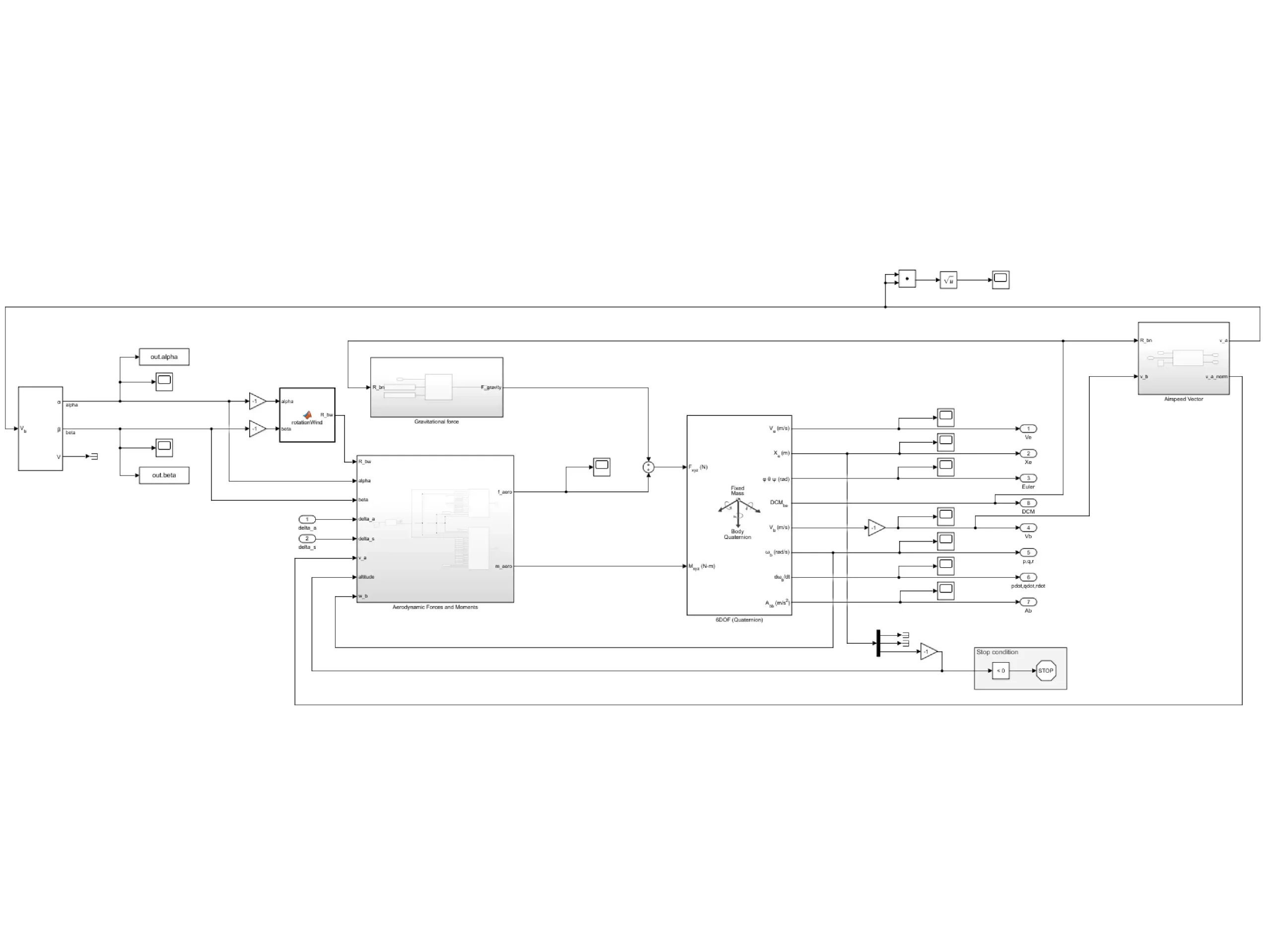
Parafoil Guidance Navigation and Control System
The Pyxis’ payload will consist of a Payload-Homing system, capable of landing in a target zone.
To control the Homing system a Guidance, Navigation and Control (GNC) algorithm is needed. The GNC system is divided in 3 subsystems:
- Navigation:
The Navigation subsystem is responsible for the estimation of the payload’s position, velocity and attitude. It’s based on a Kalman Filter that fuses the a priori information given by the mathematical model of the parafoil, and the measures of the sensors in the payload electronics.
- Guidance:
Given the states of the payload, the Guidance subsystem computes the optimal trajectory and set of maneuvers which lead to landing in a safe target area, while avoiding prohibited zones.
- Control:
The Control subsystem minimizes the difference between the actual trajectory of the payload and the optimal trajectory, by controlling the parafoil asset through control lanyards pulled by two servo motors. The control algorithm chooses the lanyard’s length while accounting for external disturbances such wind and measurement uncertainties.
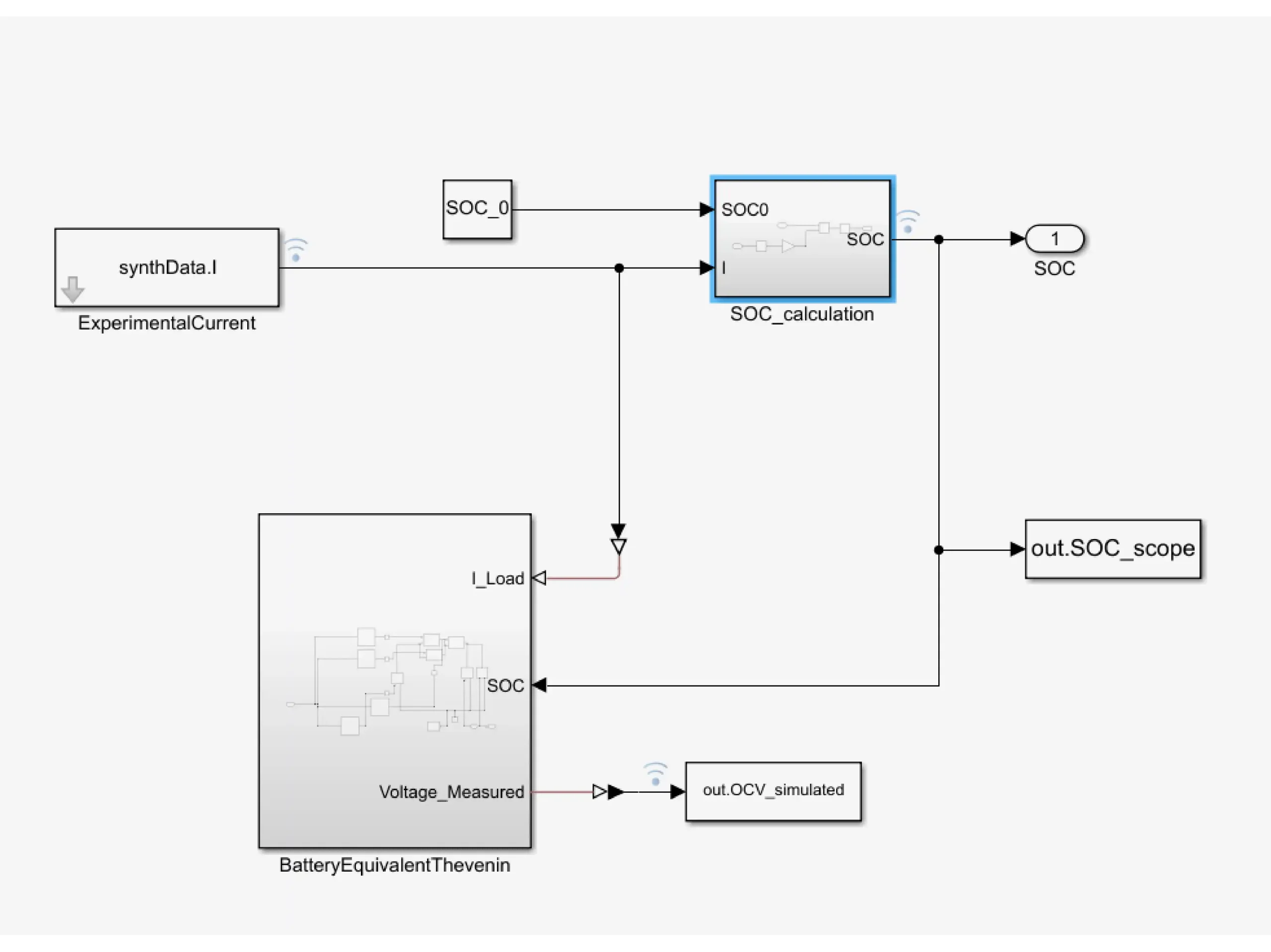
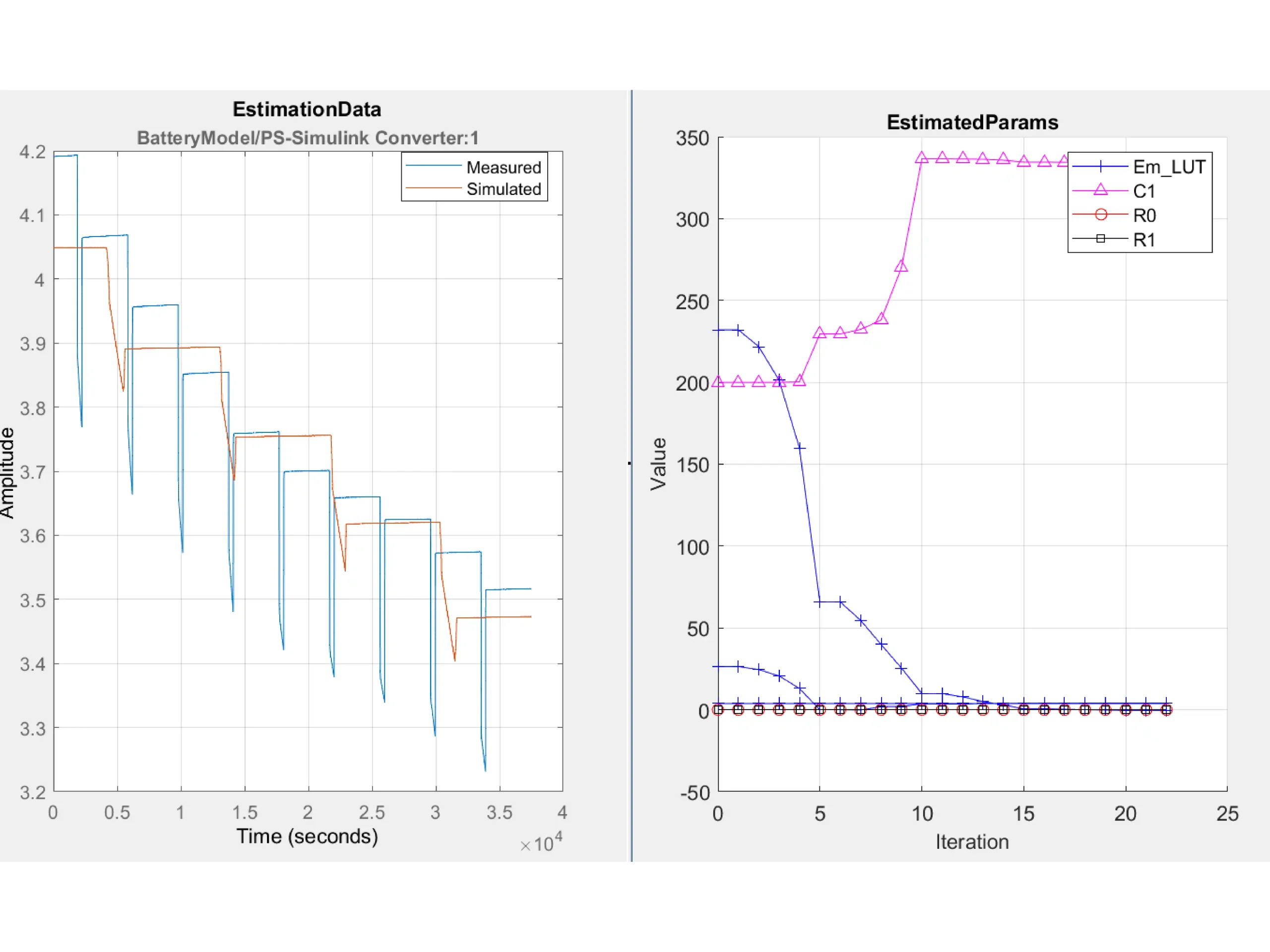
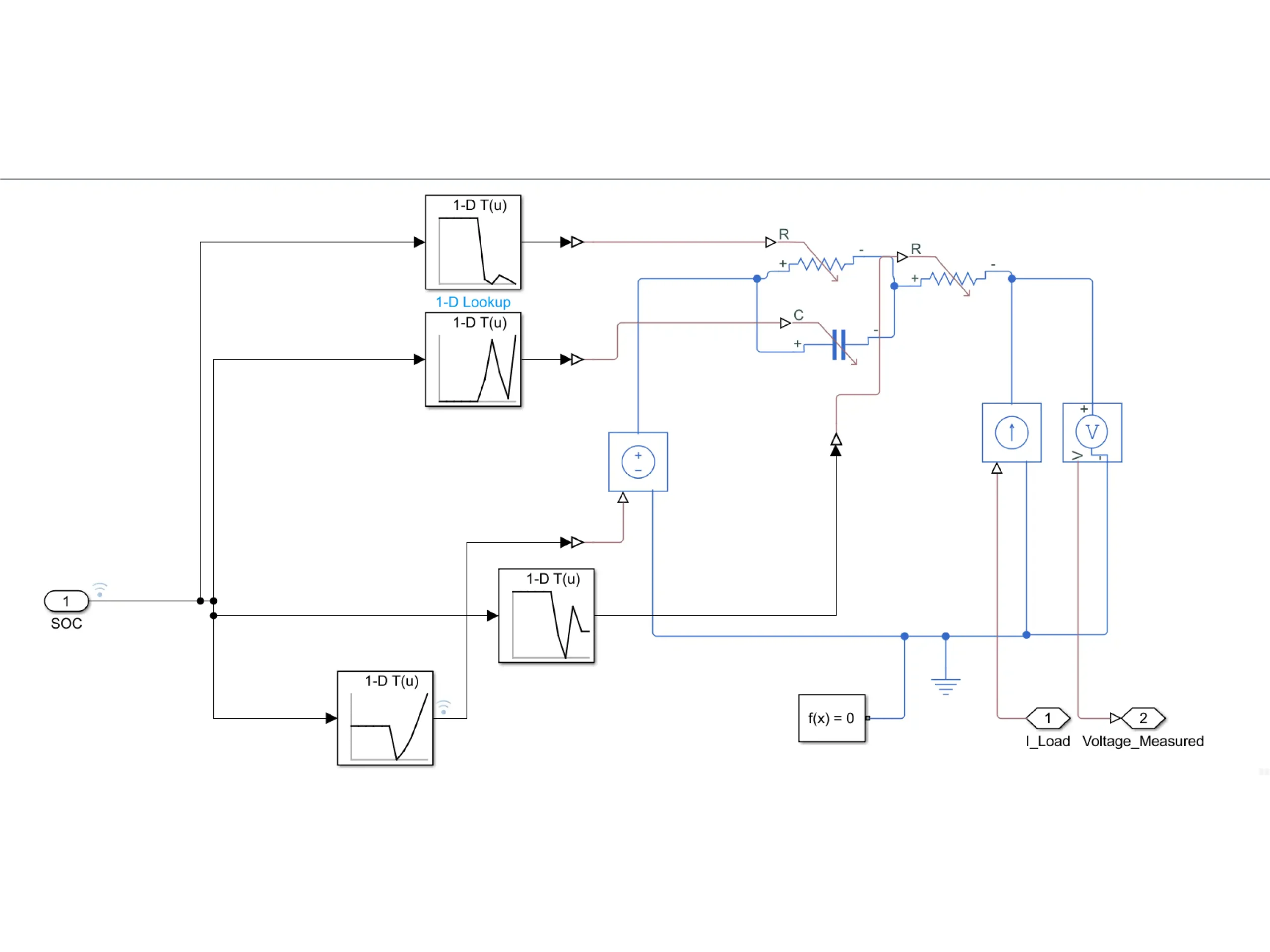
Battery management system
The Battery management system (BMS) is an algorithm that manages the LiPo battery used to power the rocket’s electronics.
The main goal is to protect the battery from working outside its safe operating conditions, while estimating its State of Charge. This algorithm allows the optimization of the battery weight and avoids possible hazards during the mission.